Universal Gripper for Soft Robotics��
Embedded pneumatic networks (PneuNets) enable actuation of large amplitudes in soft elastomers by pressurizing embedded channels.
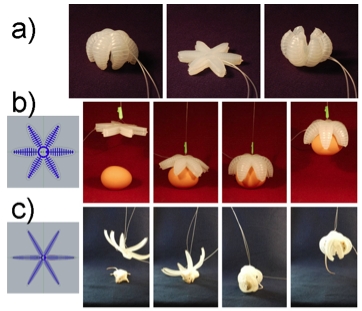
- A two-layer device that can achieve continuous shape changes from positive curvature to negative curvature.
- A starfish like structure that can grasp an uncooked egg.
- Another starfish like structure that can wrap around and pick up irregular objects, such as a live mouse, without causing any damage.
These devices are essential to make soft robotic manipulators.
�David A. Weitz (Physics & Applied Physics)
George M. Whitesides (CCB)
Robert J. Wood (Robotics)
Cynthia M. Friend
Harvard MRSEC (DMR-1420570)