Tough Adhesives
for Wet Surfaces
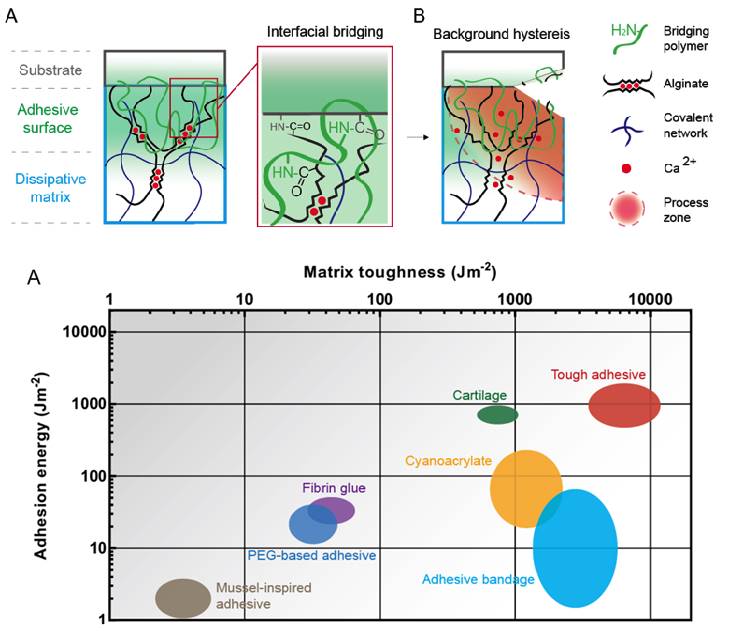
Design and function of tough adhesives. (A) The tough adhesive (TA) consists of a dissipative matrix (light blue square) made of a hydrogel of hybrid ionic and covalent bonds (blue and black lines), and an adhesive surface (light green region) that contains bridging polymers with positively charged primary amines (green lines). Physical penetration of the bridging polymer may occur between the adhesive and the substrate (light green region). (B) As an interfacial crack approaches, a large process zone (pink area) dissipates significant energy as ionic bonds between alginate chains and calcium ions are broken. (C) Material property chart of these new tough adhesives (red) and existing adhesives in terms of adhesion energy and matrix toughness, including hydrogel-based adhesives (fibrin glues, PEG-based adhesive like COSEAL, mussel-inspired adhesives), adhesive bandages, cyanoacrylate and cartilage. These data demonstrates the TA has superior adhesive performance over all existing adhesives, and even forms adhesion comparable to that between cartilage and bone in the body.
Adhesion to wet and dynamic surfaces is important in many fields, but has proven extremely challenging. A Harvard MRSEC team of experimentalists and theorists led by Mooney, Suo, and Vlassak are developing bio-inspired adhesives consisting of two layers: An adhesive surface and a dissipative matrix (a). The former adheres to the substrate by several mechanisms. The latter amplifies the dissipation of energy through hysteresis (b). The two layers synergistically lead to higher adhesion energy on wet surfaces like biological tissues than all existing adhesives (c, red). Adhesion is fast (within minutes), and compatible with dynamic movement. This design is fundamentally different from existing adhesives that result in a brittle matrix. This new family of tough adhesives has many areas of application.
David J. Mooney (BioEng),
Zhigang Suo (MechEng & MatSci), and
Joost J. Vlassak (MatSci & MechEng)
Harvard MRSEC (DMR-1420570)